小米杯Docker环境搭建教程
一、简介
cyberdog_sim 镜像提供了基于赛道的 Cyberdog 四足机器人 Gazebo 仿真平台,能够使 Gazebo 仿真程序直接与 Cyberdog 的控制程序 cyberdog_control 进行通信。仿真平台及依赖均已安装并编译完成。
二、镜像内容
ros2-galactic文件目录:/opt/ros/galacticgazebo11eigen库 文件目录:/home/eigen-git-mirrorlcm通信库 文件目录:/home/lcmcyberdog功能包 文件目录:/home/cyberdog_ws该目录包含 Cyberdog 的主要功能包、全局管理、运控管理等 ROS 节点及通用接口库。cyberdog仿真平台 文件目录:/home/cyberdog_sim该目录包含 cyberdog_locomotion 和 cyberdog_simulator 两个平台,并提供基于 RViz2 的可视化工具,可将机器狗状态的 LCM 数据转发到 ROS。
三、推荐环境配置
- Ubuntu 20.04
- Docker 20.10.21
- Docker 安装教程:
四、推荐机器配置
- 处理器(CPU):推荐使用 4 核心及以上处理器
- 内存(RAM):建议 16GB 或以上
- 图形处理器(GPU):推荐使用具有图形加速能力的 NVIDIA 独立显卡
- 存储:建议预留 50GB 以上空间,推荐使用 SSD 固态硬盘
五、下载 Docker 镜像
下载镜像文件:
网盘下载
六、本地导入 Docker 镜像
Bash
sudo docker load -i cyberdog_raceV2.tar七、授权 X Server
Bash
xhost +八、运行 Docker 镜像
Bash
sudo docker run -it --privileged=true \
-e DISPLAY=$DISPLAY \
-v /tmp/.X11-unix:/tmp/.X11-unix \
cyberdog_sim:v1九、运行仿真程序
Bash
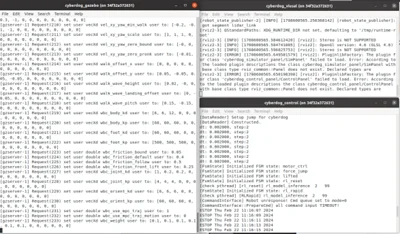
cd /home/cyberdog_sim
python3 src/cyberdog_simulator/cyberdog_gazebo/script/launchsim.py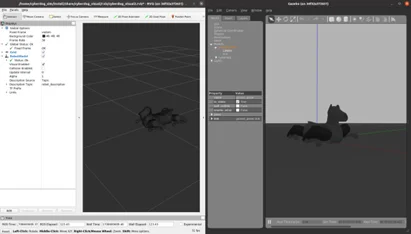
十、运行运动控制管理接口程序
Bash
cd /home/cyberdog_ws
source /opt/ros/galactic/setup.bash
source install/setup.bash
ros2 run motion_manager motion_manager